1. Introduction
1.1 Background
2. Methodology
2.1 Analysis
2.2 Tam-Thies SST model
2.3 Simulation Details
3. Results and Discussion
3.1 Optimal RANS model candidate
3.2 Coefficient optimization for model
3.2 Self-similarity of optimized models
4. Conclusion
Appendix
1. Introduction
1.1 Background
The turbulent jet is an important fluid phenomenon for the propulsion of gas turbines. A turbulent jet is often simulated using computational fluid dynamics (CFD) methods to predict the behavior of fluid at fuel injection [1], and cooling of the engine through the injection of air or water into the turbine [2]. Also, jet plumes from engines have been the subject of aero-acoustic analysis for the reduction of noise. A transient jet, where the inlet velocity decelerates from a steady-state turbulent jet, has been widely studied for applications such as fuel injection in diesel engines [3] and volcanic eruptions [4].
Direct numerical simulations (DNS) by Shin et al. [5] and Craske and Van Reeuwijk [6], as well as experiments by Borée et al. [7] and Witze [8], have been conducted on decelerating jets. Models for unsteady jets and plumes have also been developed. Morton et al. [9] proposed a model for steady axisymmetric plumes, assuming self-similarity of mean axial velocity and mean buoyancy force. Additional modeling of unsteady jets has been carried out by Scase et al. [10], Craske and Van Reeuwijk [11], Musculus [3], and Shin et al. [5]. Unsteady turbulent plume problems have also been examined by Wise and Hunt [12], Scase et al. [13,14], Craske and Van Reeuwijk [6,15].
Craske and Van Reeuwijk [11] suggested using governing equations based on mean energy conservation as an alternative to the classical mass-momentum formulation, without relying on self-similarity. However, models by Musculus [3], Craske and Van Reeuwijk [6], Scase et al. [10,13,14] assume self-similarity as the basis of their models, demonstrating this assumption to be useful. Although many models for unsteady turbulent jets and plumes assume self-similarity, Shin et al. [5] showed that a model based on the self-similarity assumption aligns well with simulation data for the normalized velocity moments profile of decelerating jets.
The Reynolds-Averaged Navier-Stokes (RANS) model is widely used to predict the behavior of turbulent flows at a relatively low computational cost. Bardina et al. [16] validated RANS models across various flows and concluded that the and SST models perform best for jet flows, although they tend to overpredict the spreading rate of circular jets, a limitation known as the plane and circular jet anomaly. Georgiadis et al. [17] tested various RANS models to verify their predictions for jet flow from a lobed nozzle. Similarly, Koch et al. [18] applied the model to an axisymmetric jet from a two-stream nozzle and found good agreement, though with an under-prediction of turbulent kinetic energy.
Due to the limitations of the RANS turbulence model, as noted by Spalart [19], specifically that a universal coefficient for arbitrary flows does not exist, research has been focused on optimizing the model by adjusting its coefficient set for various flow types. Ray et al. [20] and Morgans et al. [21] each conducted coefficient calibration of and models for jets in crossflow, while Givi and Ramos [22] modified the model coefficients for a better approximation of jet spreading rates.
To address the plane and circular jet anomaly and improve the predictability of circular jets, Pope [23] suggested adding a vortex stretching term to the model to enhance the spreading rate prediction for round jets. Thies and Tam [24] modified the model’s coefficients for compressible flows, creating the Tam-Thies model and subsequently the Tam and Ganesan model [25] for heated jets. The Tam-Thies model showed better alignment with experimental data than the standard and SST models, though it produced significantly lower levels of turbulence kinetic energy [26]. Recently, Li et al. [27] further adapted the Tam-Thies model into an SST formulation suited for simulating round jets in near-wall regions, with the specific aim of improving impinging jet predictions.
This paper aims to improve the RANS model for jet flows that decelerate to zero. Four different turbulence models are benchmarked using standard coefficient sets, and the model with the lowest sum of root mean square errors is selected through an iterative process. Two optimization modes are conducted to create new coefficient sets: one focused on reducing mean velocity errors and other on reducing errors in both mean velocities and Reynolds shear stress. The self-similar properties of the optimized models are then verified.
2. Methodology
2.1 Analysis
The Navier-Stokes equations in cylindrical coordinates are formulated as follows [28]:
From these equations, flow properties can be expressed using shape functions based on the self-similarity assumption [5]:
The central axial velocity can be expressed in terms of axial distance, time, a virtual time origin , and a constant :
The self-similarity constant related to the temporal evolution of the axial velocity at the centerline is specified as . The following equations are related to :
We denote the values of obtained from different equations with specific subscripts. Equation 6 reorganizes the momentum equation under a high Reynolds number assumption to obtain , while equation 7 integrates to yield . Equation 8 is derived by applying equation 5 to the momentum equation, using to express shear stress through the mean velocity profile, and equation 9 derives by calculating the gradient along the center axis.
2.2 Tam-Thies SST model
The Tam-Thies model is a variation of the model that incorporates an additional vortex stretching term, as suggested by Pope [23], with coefficients adjusted by Thies and Tam [24] to simulate jet spreading rates more accurately. This model has demonstrated superiority over conventional two-equation turbulence models in predicting mean velocity [26]. The governing equations are as follows.
where turbulent eddy viscosity is calculated as
and vortex stretching term X is
with the components defined as:
The standard model parameters of Tam-Thies model are as follows: =0.087, =1.40, =2.02, =0.32, =0.38, and =0.82.
The SST model combines Wilcox’s model for the near-wall regions with the model for the far-field region [29]. The SST version of the Tam-Thies model is designed to replace the model with the Tam-Thies model in the SST model framework, retaining the vortex stretching term and allowing simulation of domains with wall-bounded flow. This SST adaptation of the Tam-Thies model was suggested for modeling impinging jet [27]. In this work, it was adopted for the simulation of a turbulent jet from a flat plate without co-flow, since at the simulation using the conventional Tam-Thies model, the X term has diverged 𝜖 value near the wall and consequentially velocity and pressure. The governing equations are as follows.
where
with the components defined as:
The general coefficients of the Tam-Thies model are adapted to derive the coefficients for the SST version of the model as follows:
The resulting model parameters of Tam-Thies SST model are as follows: =0.087, =1.40, =0.4, =1/0.32, =1/0.38, and =0.0713. The remaining equations and parameters are identical to those of the SST model.
2.3 Simulation Details
Numerical simulations were conducted using OpenFOAM 11 with an axisymmetric mesh. A single grid size of 0.02𝜋 radians is in the circumferential direction to reduce the mesh size and replicate a one-hundredth of the cylindrical domain, spanning =0-90 in the axial direction and =0-30 in the radial direction. However, the sharp angle reduces the mesh quality, so the grid study was conducted to resolve this issue.
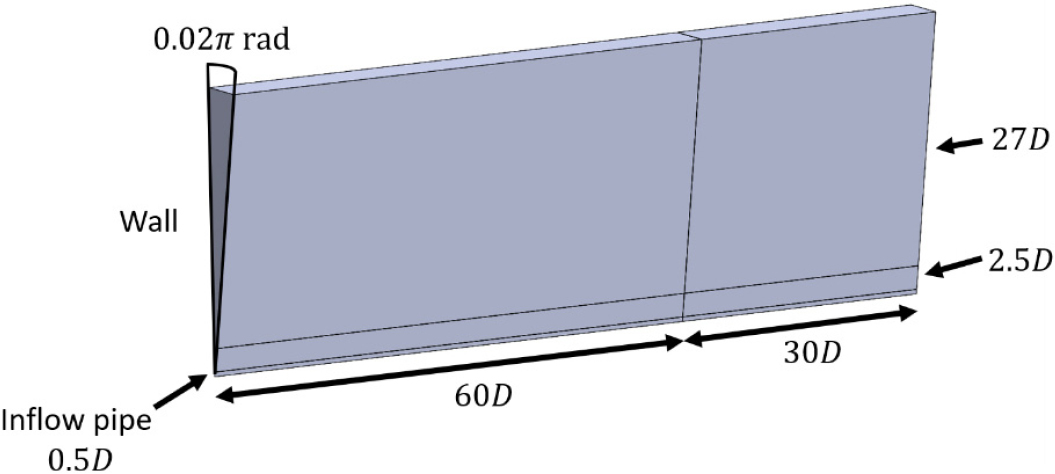
The computational grid consists of three blocks in the radial direction. The first block covers =0-0.5 with cells that have a uniform growth rate, with decreasing mesh size as the radius increases. The second block spans =0.5-3 and also has a uniform growth rate, with increasing mesh size as the radius increases. The final layer, from =3-30 consists of equidistant cells. In the axial direction, the mesh is divided into two blocks: the first block, covering =0-60, consists of cells with a uniform growth rate with increasing mesh size as further from the jet inlet, while the second block, spanning =60-90, is composed of equidistant cell layers. The resulting mesh structure is shown in Fig. 1.
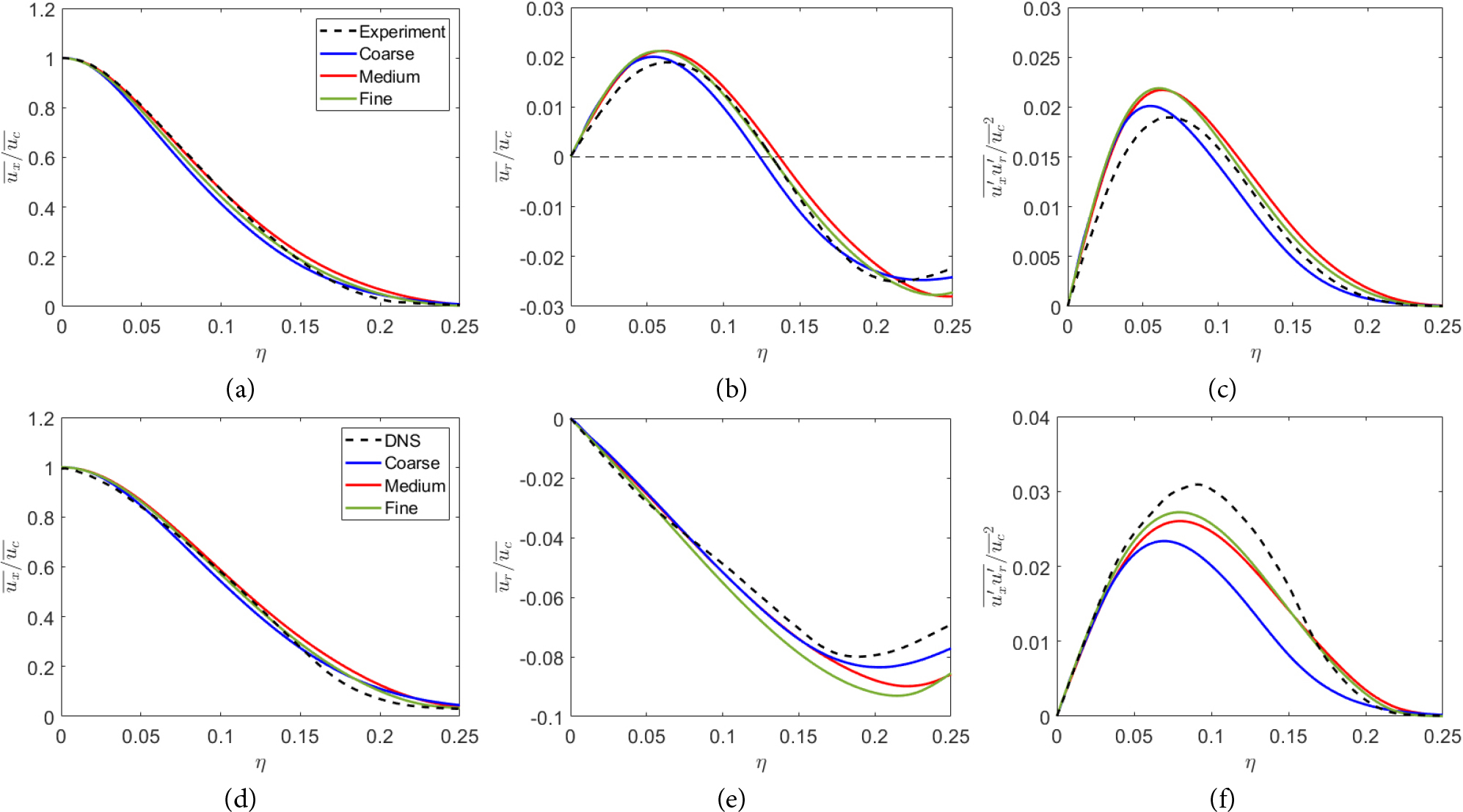
A grid study was conducted using the standard coefficients turbulence model. The steady-state jet was compared with experimental data from Panchapakesan and Lumley [30], while the decelerating-state jet was validated against DNS data from Shin et al. [5]. The medium mesh size included a layer of 10 cells in the first radial block and 600 cells in the first axial block. Different meshes were studied, including a coarse mesh with 5 cells in the first radial block and 300 cells in the first axial block, as well as a fine mesh with 20 cells in the first radial block and 1200 cells in the first axial block. The medium mesh achieved convergence with the fine mesh, demonstrating its suitability for this research, as shown in Fig. 2.
The radial grid of the selected mesh consists of three blocks. The first block has 10 cells with maximum and minimum cell sizes of and , respectively. The second block contains 20 cells with maximum and minimum cell sizes of and , and the final block has 80 cells, each with a cell size of . In the axial direction, the mesh consists of two blocks: the first block has 600 cells with maximum and minimum cell sizes of and , while the second block has 60 cells, each with a cell size of .
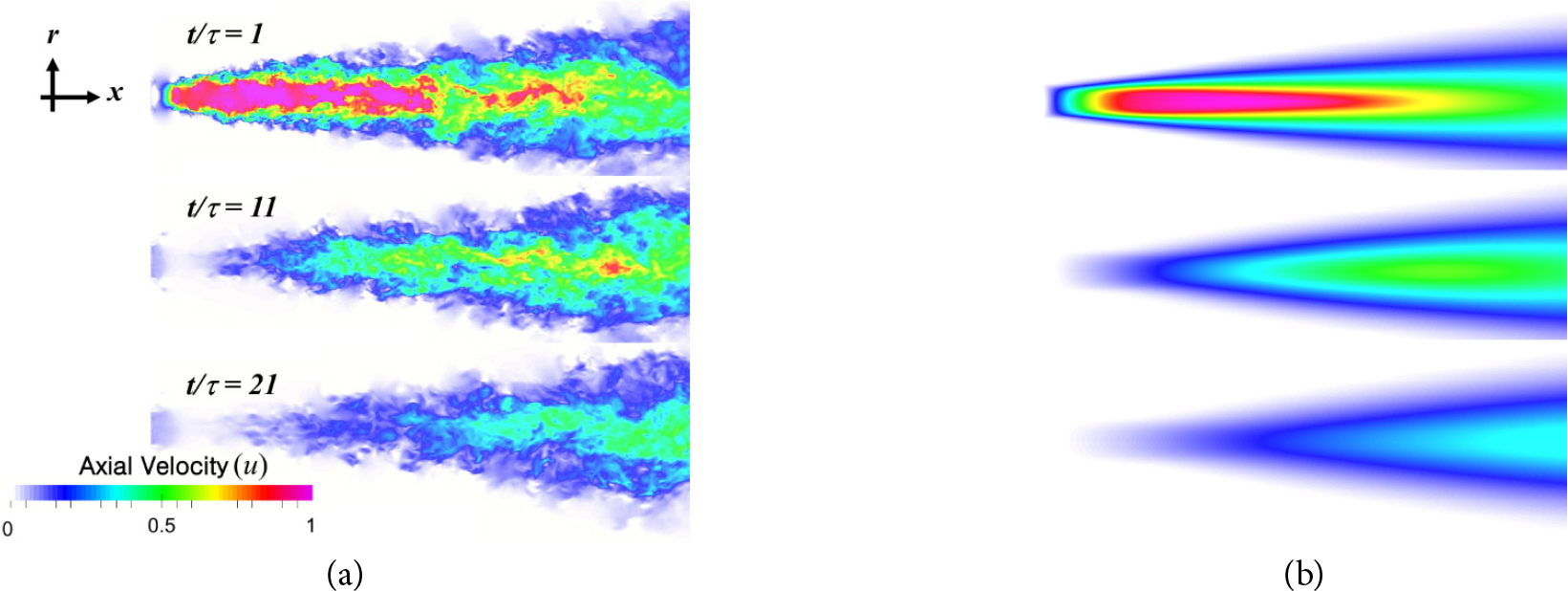
The round jet is exerted with a top-hat velocity profile from a circular inlet at the center of a flat wall into a domain initially filled with stationary fluid, with a Reynolds number of =7290, and a turbulence intensity of 1.7% imposed at the inlet. Far-field and outflow surface boundaries are configured using the outflow boundary condition. The flow was simulated for 620 jet times () for initialization, after which data for the steady state was sampled over next 380 𝜏, until reaching 1000 𝜏. At 1000 𝜏, the jet inlet velocity started to decrease linearly and reached zero at 1001 𝜏. From this moment, an additional 70 𝜏 of simulation was conducted, and the final 20 𝜏 were sampled for the decelerating state, resulting in the velocity progression shown in Fig. 3 at 1001, 1011, and 1021 seconds (1, 11, and 21 second after deceleration began). Fig. 3b shows RANS data in comparison with DNS data in Fig. 3a from Shin et al. [5].
3. Results and Discussion
3.1 Optimal RANS model candidate
RANS turbulence models were tested for validation on both steady and decelerating jets. The open-source code OpenFOAM was used to solve the Navier-Stokes equations. Among two-equation turbulence models, the and SST models were selected, while the Spalart-Allmaras was chosen for a one-equation model. The Tam-Thies model was also tested, but the result did not converge for a flat plate domain, showing stability only under co-flow conditions. Consequently, the Tam-Thies SST model was used as an alternative.
The simulation error, compared to experimental steady-state data [30] and DNS results for the decelerating state [5], was quantified using the normalized root mean square error (RMSE), as defined by equation 22 for the scalar Y. The RMSE between the URANS and reference data across the radial range of 𝜂=0-0.25 was computed using first-order numerical integration, and normalized by the amplitude of the reference data.
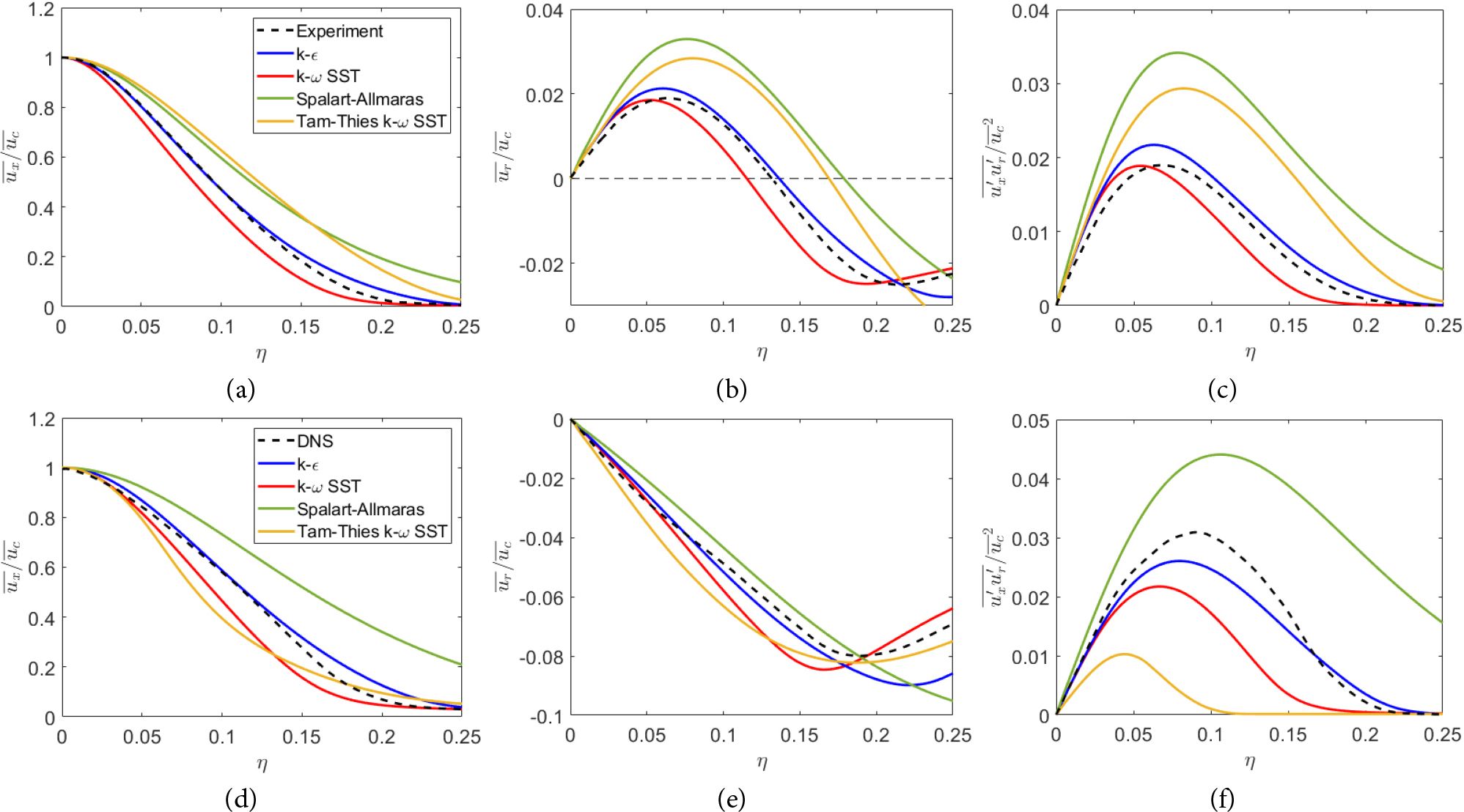
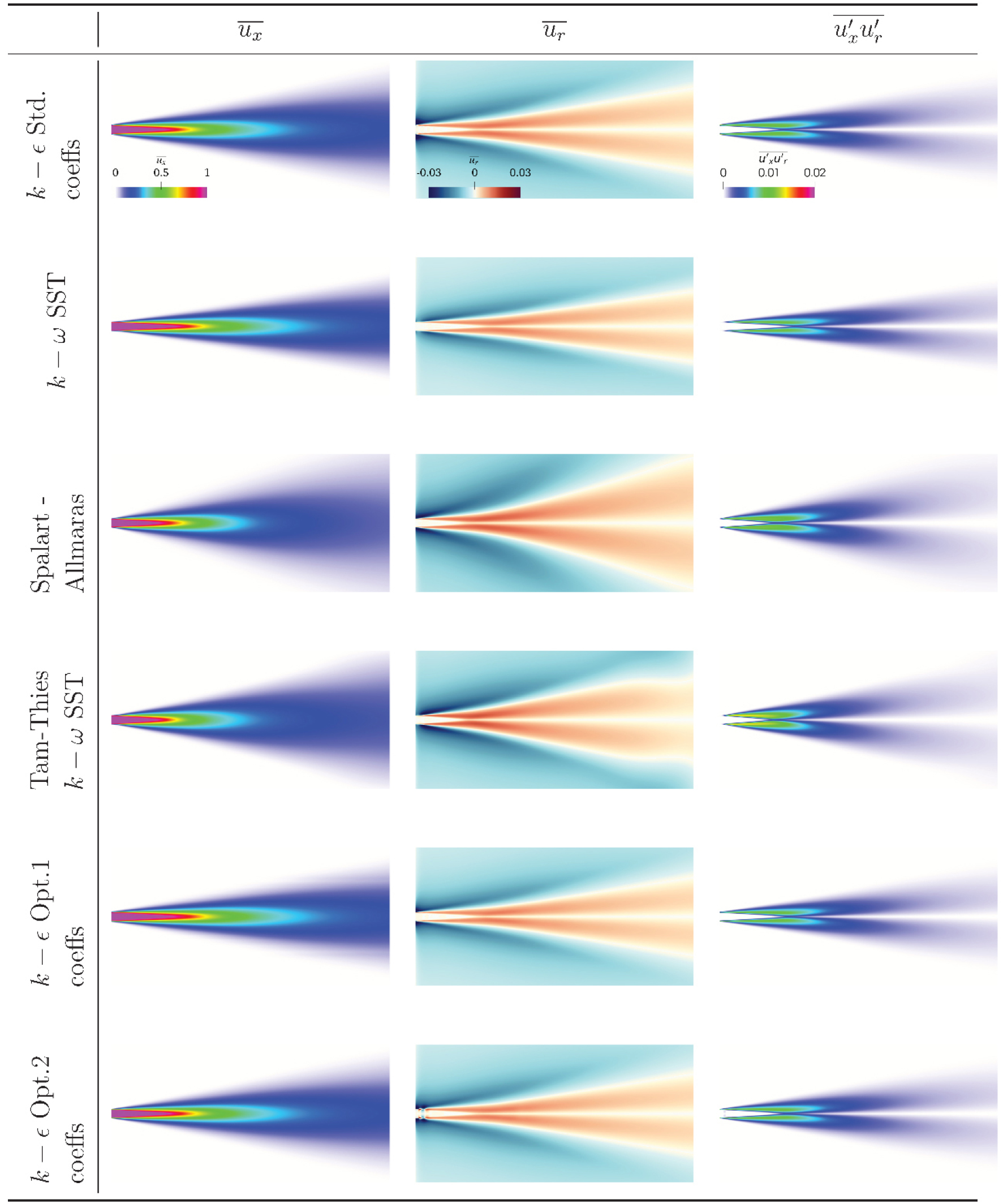
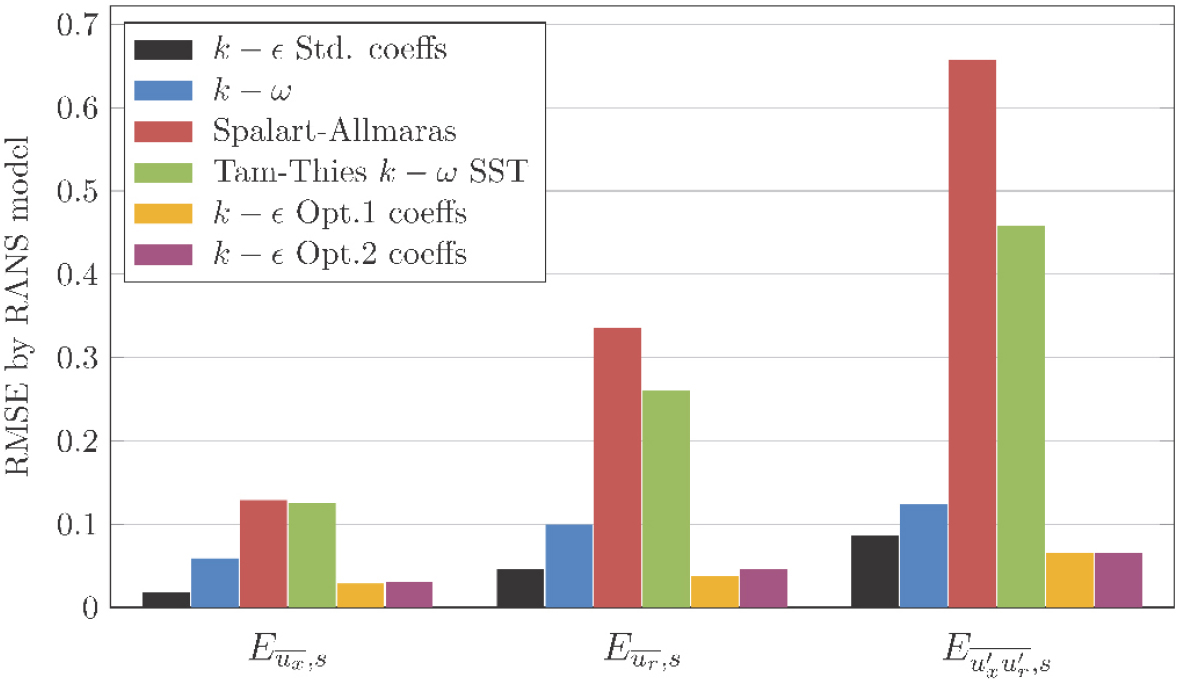
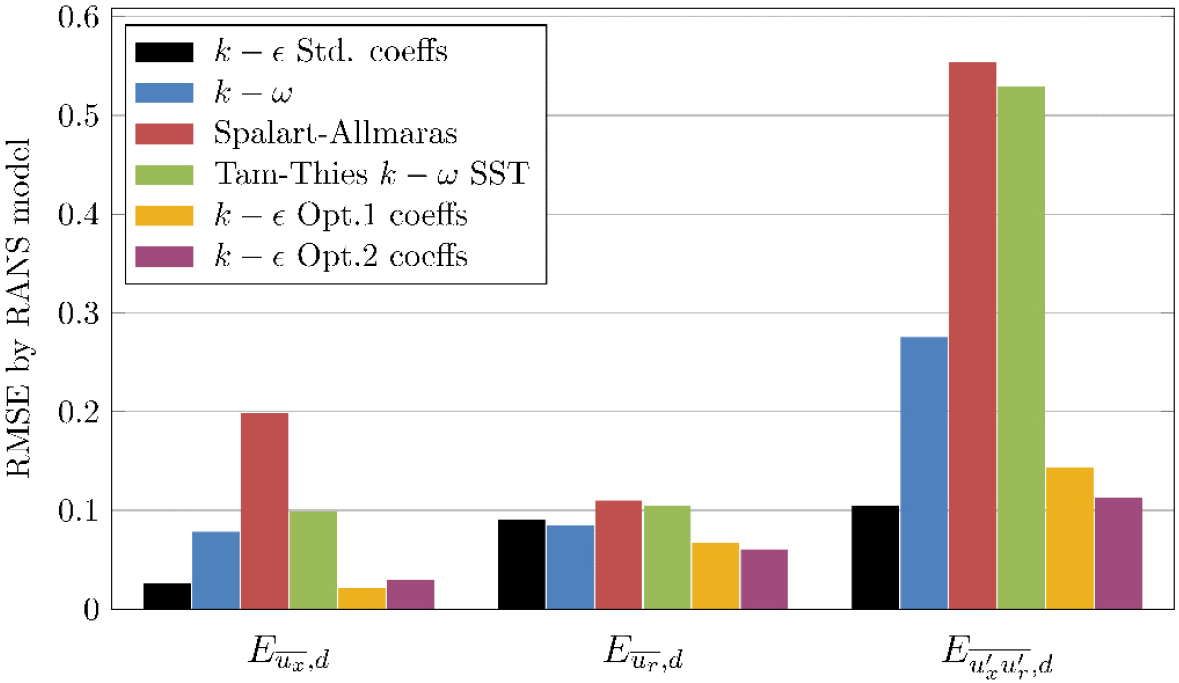
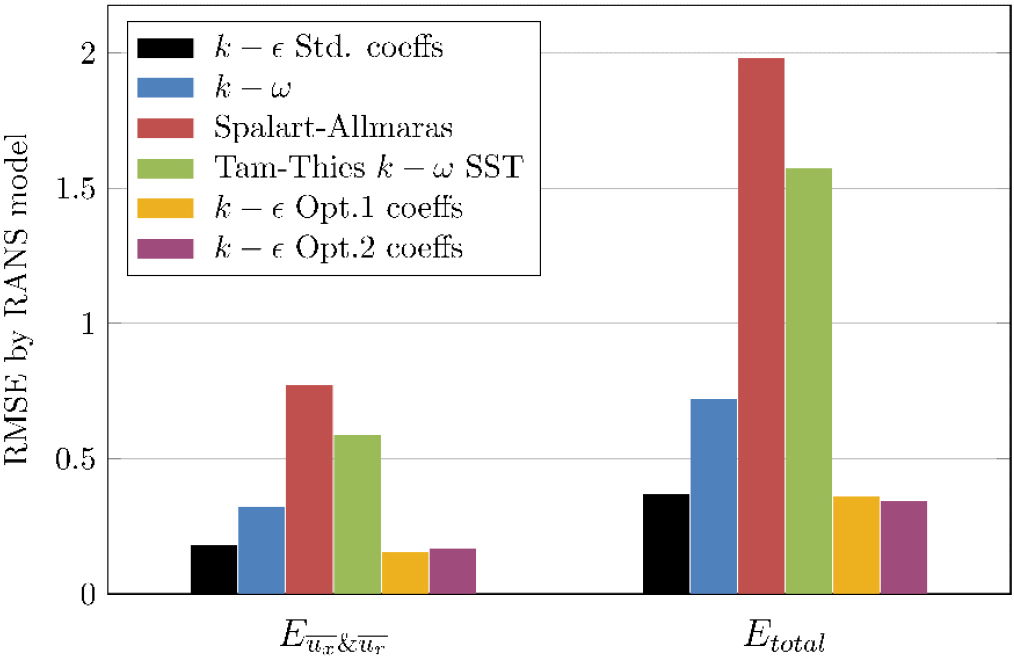
Fig. 4 shows the results of various RANS turbulence models with their default coefficients. Figs. 4a-4c compare the models for a steady axisymmetric jet, while Figs. 4d-4f show comparisons for a decelerating jet. Errors for the axial velocity , radial velocity , and Reynolds shear stress were calculated for both steady and decelerating states. The resulting errors for each plot and their summations are presented in Table 1. These errors are further compared across steady jet simulations in Fig. 5, decelerating jet simulations in Fig. 6, and the summation of errors in Fig. 7. Here, denotes the summation of the four mean velocity errors, as defined in equation 23, and represents the total of all six errors, as described in equation 24.
The one-equation Spalart-Allmaras model showed inferior results compared to two-equation and SST models, as observed by Bardina et al. [16], displaying high error summations in both steady and decelerating jets. The Tam-Thies SST model performed reasonably better than the Spalart-Allmaras model but worse compared to other two-equation models. Notably, the vortex stretching effect emerged as a drawback, leading to a significant underestimation of the Reynolds shear stress values in the decelerating state. Unmodified, conventional two-equation RANS models demonstrated the best results, with the lowest overall errors. Among these, the turbulence model showed the lowest errors for both and , making it the preferred model for coefficient optimization.
Table 1.
Error values for standard and optimized RANS models for steady (subscript s) and decelerating (subscript d) jets, showing errors for mean velocity, Reynolds shear stress, mean velocity error summation, and total error summation.
3.2 Coefficient optimization for model
The model was optimized for both steady and decelerating jets, following an iterative procedure shown in Fig. 8. The optimization begins with an initial coefficient set , corresponding to the standard model values .
In each iteration, the error is calculated by changing only one variable from the coefficient set . We then search for the value that minimizes the error . The iteration spans the coefficients with specific intervals: 10-3 for , 10-2 for and , and 10-1 for and . This process yields five new sets, each with a different modified coefficient, and five corresponding errors.
Among these errors, the smallest error is identified, along with the associated modified coefficient . The coefficient set that produces this smallest error, is designated as the new default coefficient set , and the error becomes for . The iteration of creating new coefficient sets is repeated until is equal to and the minimum error remains unchanged. At this point, the iteration stops, and the final set becomes the optimized coefficient set for the decelerating jet.
Two different optimized coefficient sets other than the standard coefficient set (Std.) were created, each using a different criterion for calculating the error of the coefficient set. The first optimized coefficient set (Opt.1) was created by minimizing , and the second optimized coefficient set (Opt.2) was created by minimizing .
The optimization process for Opt.1 was conducted over two iteration steps, as shown in Fig. 9. In iteration 1, the lowest error for each coefficient was as follows: produced an error of 0.1539 at a value of 0.084, resulted in 0.1736 at a value of 1.45, yielded 0.1516 at a value of 1.90, produced 0.1782 at a value of 1.0, and produced 0.1770 at a value of 1.2. The modified coefficient set with an error =0.1516 was selected, and in iteration 2, all coefficients showed the same lowest error as for the default set , concluding the process.
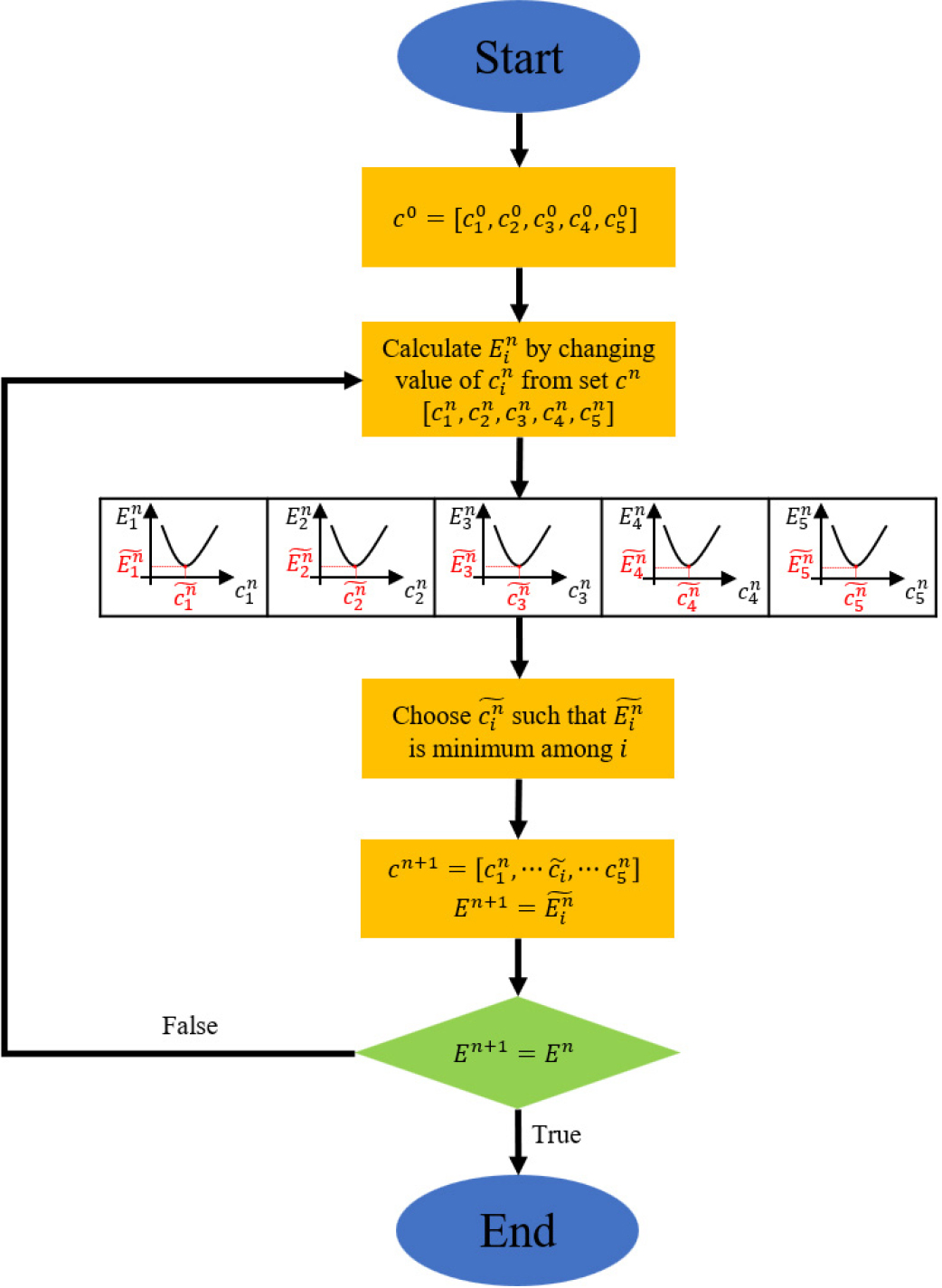
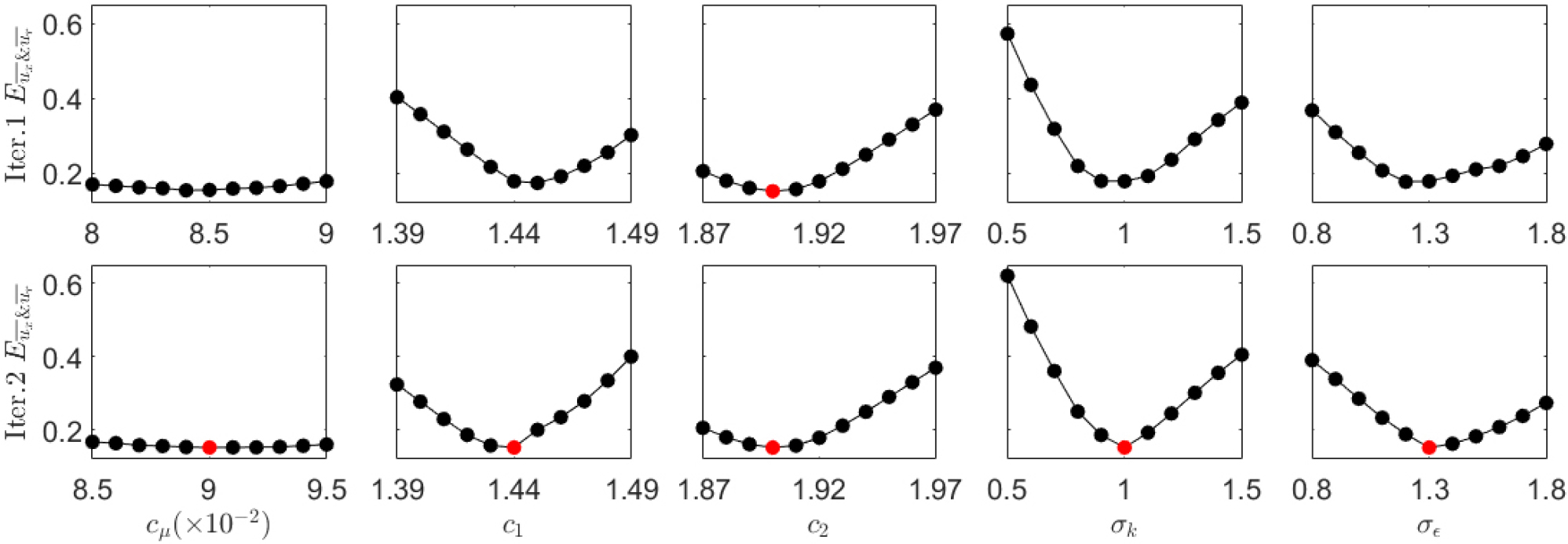
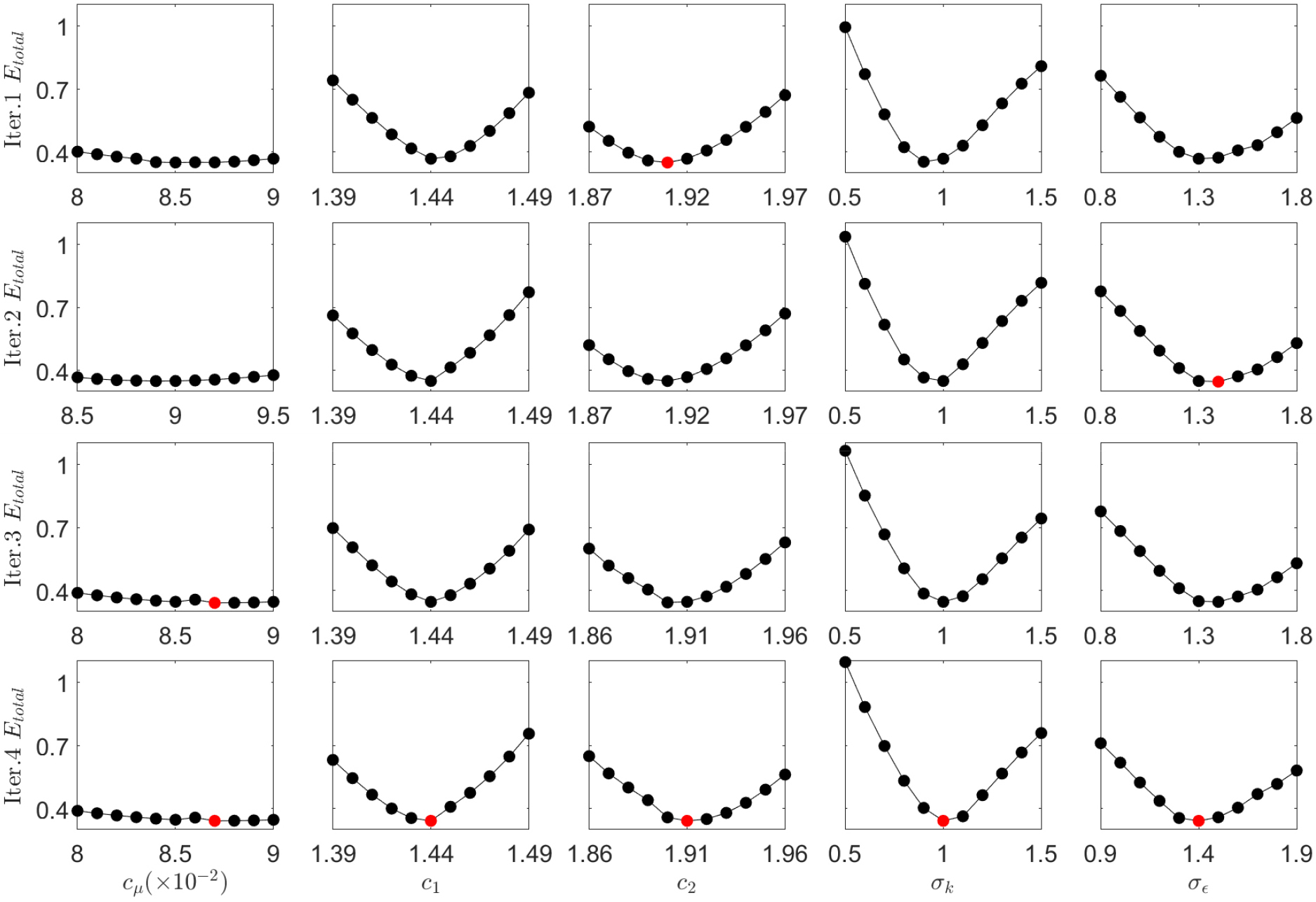
Table 2.
Optimized parameters of the model for Opt.1 and Opt.2 coefficient sets, alongside the standard coefficient set.
| Coefficient | |||||
| Std. coeffs | 0.090 | 1.44 | 1.92 | 1.0 | 1.3 |
| Opt.1 coeffs | 0.090 | 1.44 | 1.90 | 1.0 | 1.3 |
| Opt.2 coeffs | 0.087 | 1.44 | 1.91 | 1.0 | 1.4 |
The optimization process for Opt.2 was conducted over four iterations steps, as shown in Fig. 10. In iteration 1, the lowest errors for each coefficient were as follows: yielded an error of 0.3497 at a value of 0.085, resulted in 0.3678 at a value of 1.44, produced 0.3496 at a value of 1.91, resulted in 0.3531 at a value of 0.9, and yielded 0.3678 at a value of 1.3. The resulting coefficient set with an error =0.3496 was chosen.
In iteration 2 for Opt.2, the lowest errors were as follows: resulted in an error of 0.3492 at a value of 0.089, produced 0.3496 at a value of 1.44, resulted in 0.3496 at a value of 1.91, produced 0.3496 at a value of 1.0, and resulted in 0.3464 at a value of 1.4. This modified coefficient set with an error =0.3464 was adopted.
In iteration 3, the lowest errors yielded by each coefficient were as follows: produced an error of 0.3414 at a value of 0.087, yielded 0.3464 at a value of 1.44, yielded 0.3435 at a value of 1.90, produced 0.3464 at a value of 1.0, and produced 0.3464 at a value of 1.4. The modified coefficient set with an error =0.3435 was selected. In iteration 4, all coefficients showed the same lowest error as with the default coefficient set , ending the process.
The resulting optimized coefficient sets, Opt.1 and Opt.2, are shown in Table 2. In Opt.1, only differs from the original coefficient set . This modification effectively reduced the mean velocity error sum from 0.1782 to 0.1516, narrowing the gap between the model predictions and reference values, except for a slight increase in axial mean velocity error in the steady state.
Although Opt.1 was not specifically optimized to reduce Reynolds shear stress error, it still achieved an overall reduction in total error, decreasing from 0.3678 to 0.3592, particularly improving the steady-state Reynolds shear stress error.
In Opt.2, the coefficients , , and were modified. As a result, Opt.2 achieved a notable reduction in the total error summation, including both mean velocity and Reynolds shear stress errors, from 0.3678 and 0.3414. Opt.2 showed improved accuracy in radial mean velocity errors and Reynolds shear stress error for the steady state. This improvement in radial mean velocity errors also led to a decrease in the mean velocity error summation, from 0.1782 to 0.1639.
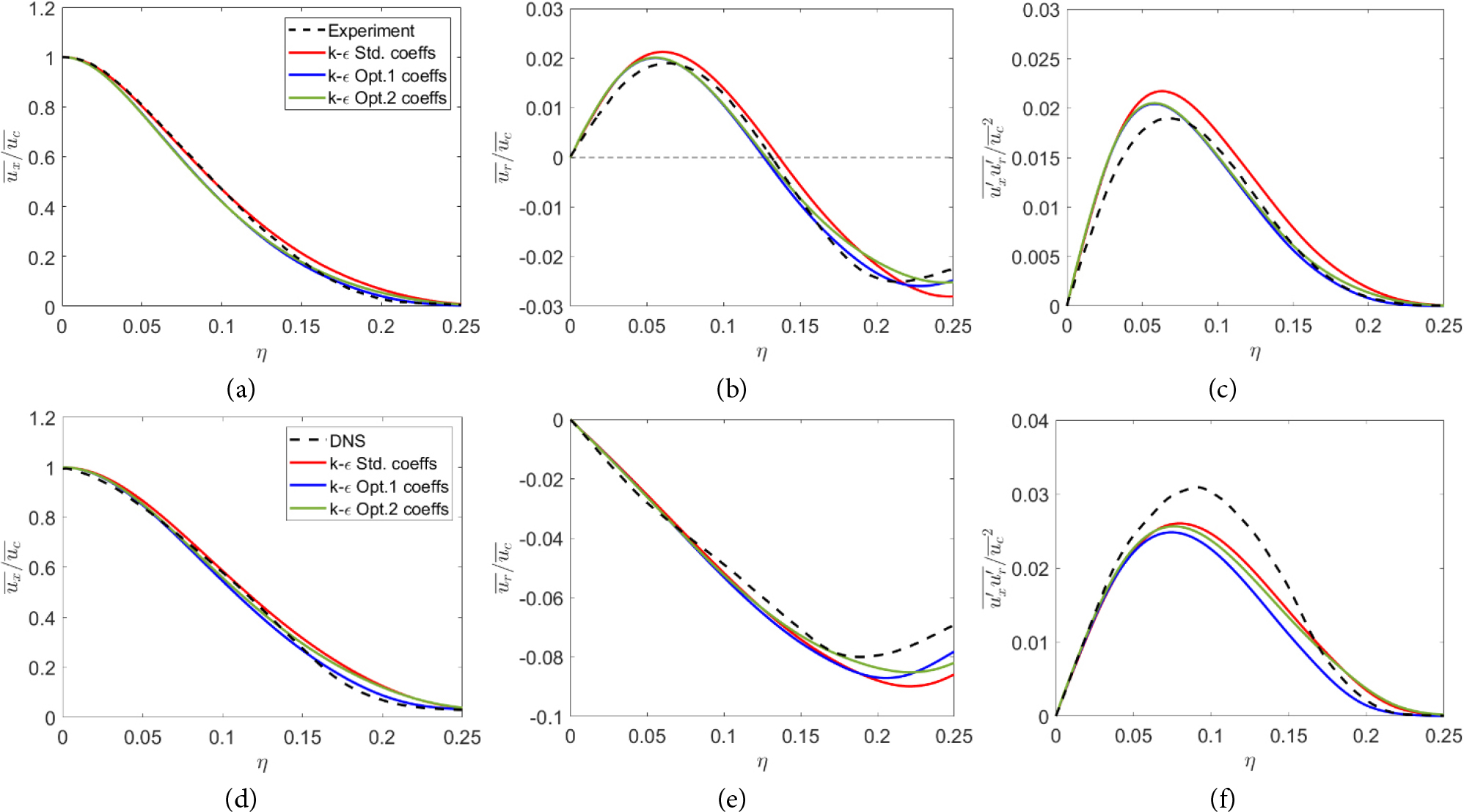
Radial profiles of mean velocities and Reynolds shear stress for the model, using standard coefficients as well as the optimized sets Opt.1 and Opt.2, are shown in Fig. 11. These profiles are compared with experimental data [30] for the steady state and DNS data [5] for the decelerating state. In the axial mean velocity profiles (Figs. 11a and 11d), the lines representing different coefficient sets are nearly indistinguishable, as the axial mean velocity error was the smallest across all sets.
For the radial mean velocity in (Figs. 11b and 11e), a major discrepancy is observed in the far-field between 𝜂=0.15-0.25. Opt.1 has a higher inflection point but largely maintains the shape of the profile with the standard coefficients, reducing errors in both steady and decelerating state. Meanwhile, Opt.2 shows an inflection point at a similar height but positioned farther from the centerline. This shift in the inflection point improves alignment with DNS data in the decelerating state up to the inflection point, achieving a greater improvement than Opt.1. However, this adjustment has less impact in the steady state, where Opt.1 achieves a larger error reduction.
For Reynolds shear stress (Fig. 11c and 11f), Opt.1 produces a lower peak closer to the centerline for both state, which reduces the error in the steady state but introduces a disadvantage in the decelerating state. Opt.2, with a similar shift but slightly stronger in the steady state, achieves a comparable improvement to Opt.1 in the steady state while exhibiting a smaller increase in error for the decelerating state.
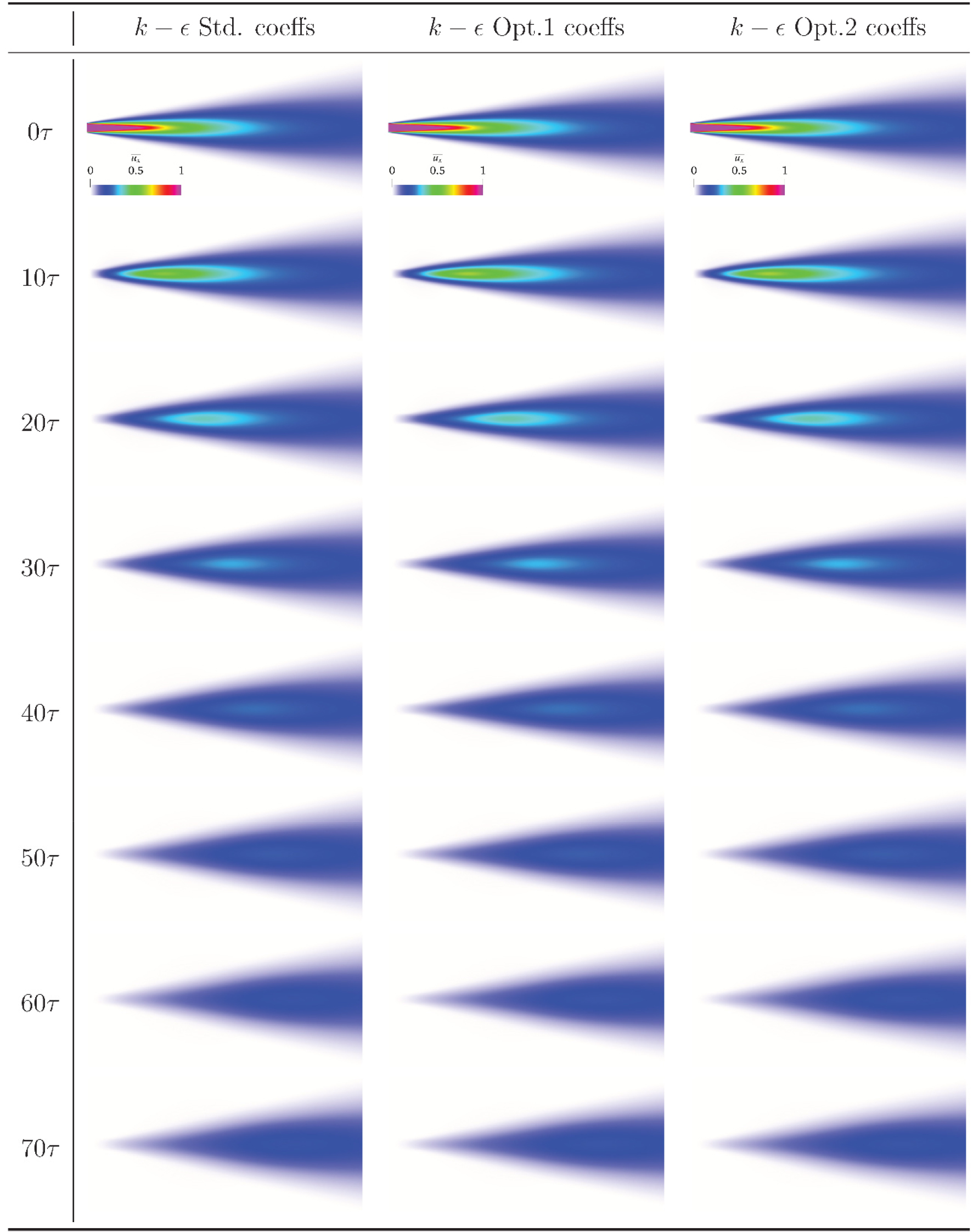
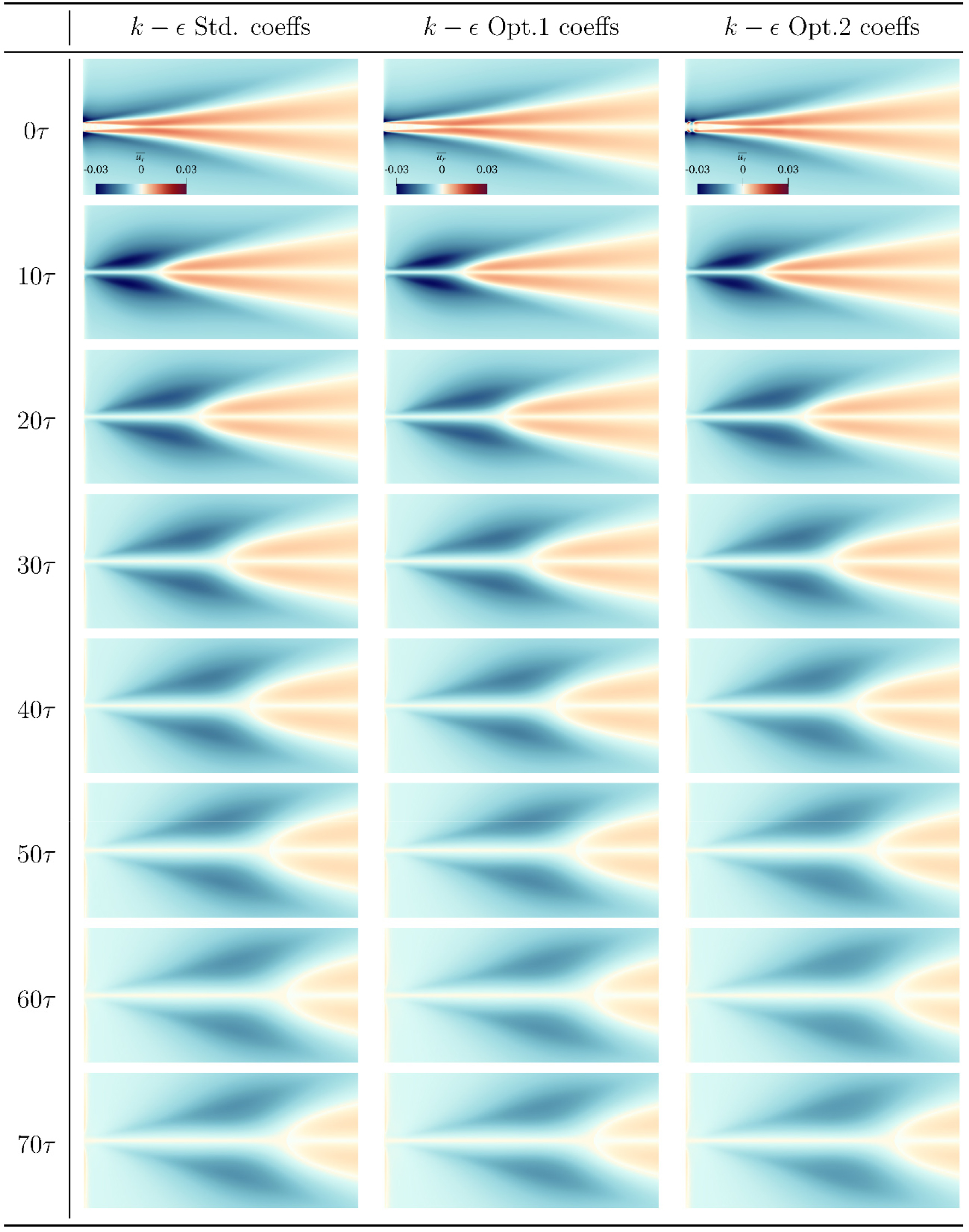
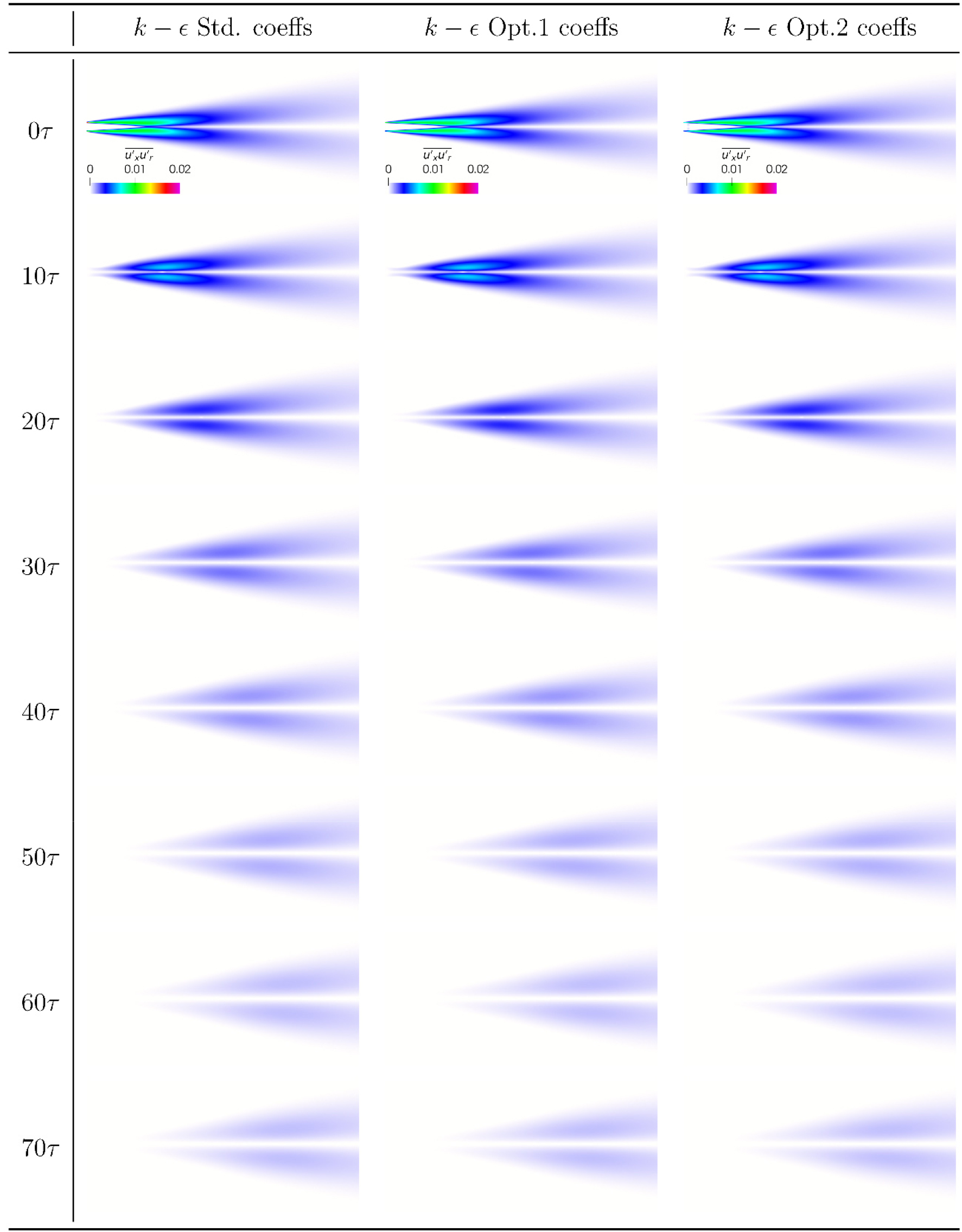
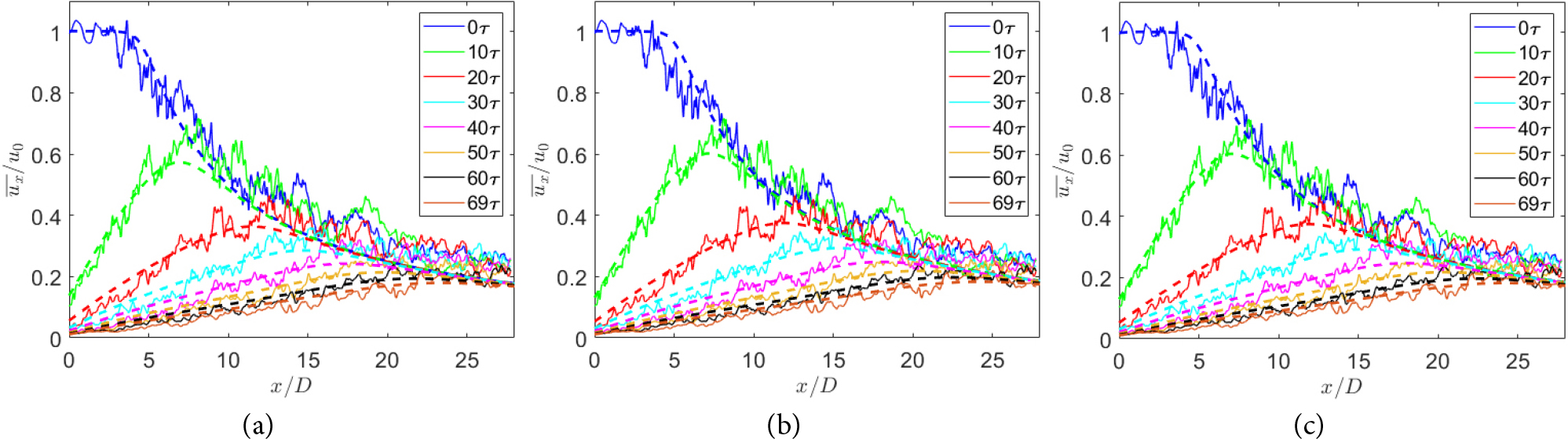
Temporal evolution of the centerline axial mean velocity after the start of deceleration is presented in Fig. 12, with a comparison to DNS data from [5]. The standard coefficient set (Fig. 12a) underpredicts the DNS result. While both optimized coefficients sets, Opt.1 (Fig. 12b) and Opt.2 (Fig. 12c), still fall below the reference DNS data, a slight improvement is evident in both cases.
3.2 Self-similarity of optimized models
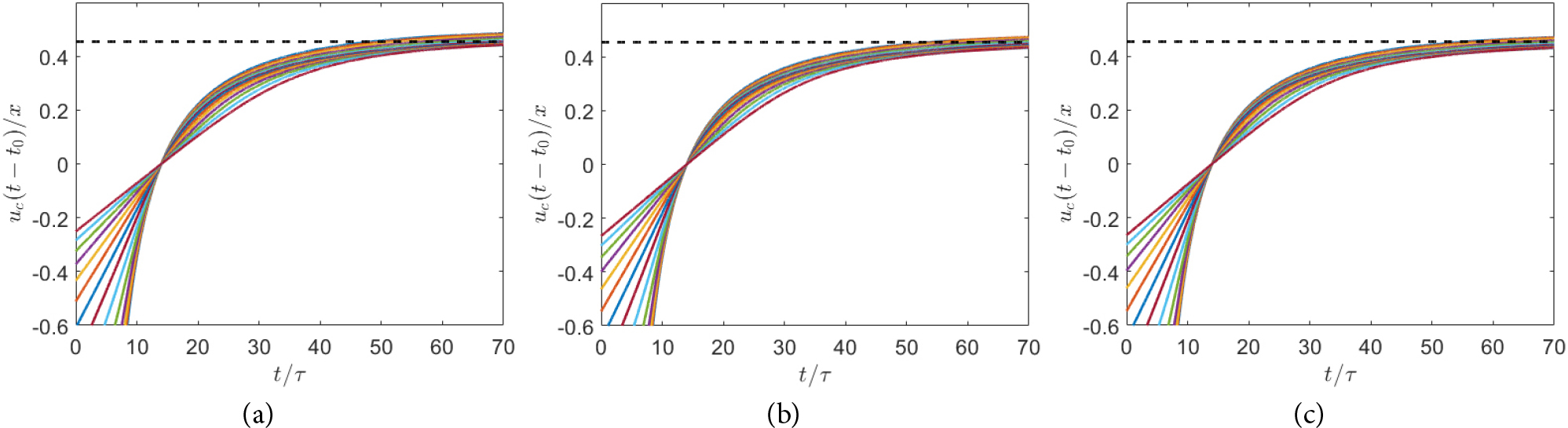
A self-similarity analysis was conducted for both standard and optimized models. Equation 5 was used to determine the constant , as shown in Fig. 13. Using , consistent with the DNS data from [5] where , the plot of at various axial distances =5-18 (Fig. 13) is shown converging asymptotically near the reference line , yielding =2.2.
In Figs. 13b and 13c, Opt.1 and Opt.2 asymptotically converged above the reference line, with values of 2.2230 and 2.2454, respectively. In contrast, the standard coefficient set (Fig. 13a) converges slightly below the =2.2 line, resulting in a value of =2.1855. Overall, the values from all three coefficient sets, Std., Opt.1, and Opt.2, closely align with the DNS result.
In addition to , was calculated from the DNS and RANS results using three other approaches: , , and . was calculated twice, once including the k term and once neglecting it. For , data integration was performed up to 𝜂=0.5, as this range was determined to be sufficient, with changes in 𝜂 by 0.1 resulting in an impact of less than 1% on the results. Centerline values were used for calculating the other coefficients. The results are summarized in Table 3.
The values for were 2.1498 for the standard coefficients, 2.1737 for Opt.1, and 2.1953 from Opt.2, showing a lower result with a consistent trend compared to the results for , but higher than the DNS value of 2.0394. For , the values were slightly higher, with 2.3866 for the standard coefficients, 2.4057 for Opt.1, and 2.4355 for Opt.2, clustering near 2.4. When calculated without the k term, showed a trend similar to that of and , with values of 2.1438 for the standard coefficients, 2.1677 for Opt.1, and 2.1892 for Opt.2, though still higher than the DNS data of 2.0676. Conversely, showed the lowest values for DNS data at 1.8193 but yielded the highest values for RANS results, with 2.7649 for the standard coefficient set, 2.8136 for Opt.1, and 2.7782 for Opt.2.
Table 3.
Values of calculated using different equations for models with three different coefficient sets at the centerline, together with result using the DNS data.
4. Conclusion
Four different turbulence models, , SST, Spalart-Allmaras, and Tam-Thies SST were compared against experimental data [30] and DNS data [5] for both steady and decelerating jets. Among these models, the model was identified as the most suitable candidate and was selected for optimization.
The optimization aimed to minimize the sum of root mean square errors across both steady and decelerating states. Two optimized coefficient sets were developed: Opt.1, which minimizes the sum of four mean velocity errors, and Opt.2, which minimizes the sum of six errors (four mean velocity errors and two Reynolds shear stress errors). The resulting coefficients were =0.090, =1.44, =1.90, =1.0, and =1.3 for Opt.1, and =0.087, =1.44, =1.91, =1.0, and =1.4 for Opt.2. Both optimized sets successfully minimized their respective target error sums and partially reduced the error for each other’s objectives.
The iteration method used a Gauss-Southwell type coordinate descent method, utilizing an incomplete 1D search to limit the number of coefficient decimal places. However, this led to an inevitable loss of accuracy and increased simulation iterations. Also, since the optimization method is fundamentally an algorithm that searches for local extrema, there is potential for further improvement in identifying global extrema and evaluating the completeness of the optimization. An improved multi-dimensional optimization method such as an artificial neural network (ANN) or response surface model (RSM) can be used for optimization [31], and data-driven methods such as ensemble Kalman filter (EnKF) [27,32] or Bayesian calibration [20] have been used for better accuracy. These enhancements should be explored for future work to advance optimization performance, and apply them to other RANS models to assess their optimization effectiveness.
Self-similarity characteristics of the standard and optimized RANS coefficient sets were then analyzed. The metrics , , and , excluding the k term, displayed similar trend, with results from Opt.1 and Opt.2 aligning well with the DNS value of =2.2.
Overall, the optimized model coefficient sets demonstrated improved mean velocity and Reynolds shear stress profiles and aligned well with self-similarity characteristics observed in the DNS data of the decelerating jet.